理工学部研究年報
モジュラーホームロボットによる家庭内作業の実現に関する研究
機械システム工学科 佐藤大祐
研究背景・目的
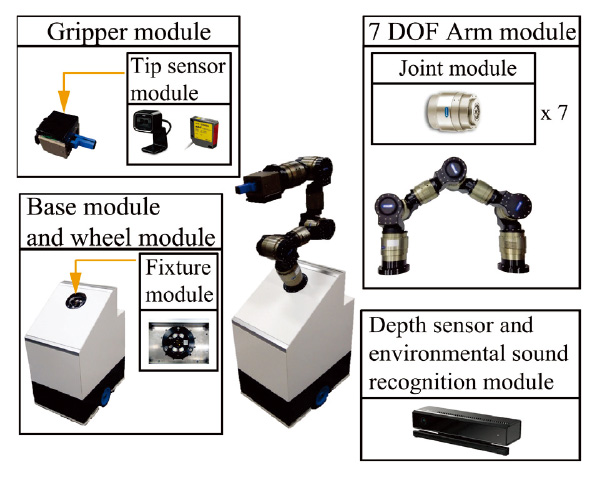
少子高齢化の進む現代の社会構造は今後より大きく変化することは明白であり、その中においてテクノロジーによる社会貢献はさらに重要性を増すと考える。本研究では、ホームロボットによる生活支援や家事代行を目標とし、ユーザごとに異なるホームロボットへの家庭内作業の要求を考慮するために、作業内容に応じてホームロボットの有する能力や機能を選択してシステムを構成することが可能なMMM(Multi-task、Modularization、Minimization)コンセプトに基づいたモジュラーホームロボットを開発しており、現在は以下の三つの研究課題に取り組んでいる。
- アフォーダンスに基づいた家庭環境内の物品認識・操作および家庭内作業の計画・動作生成
- DNNを利用した学習による家庭内作業動作生成能力の獲得とこれによる作業動作の実現
- モバイルマニピュレータおよび人型ロボットの全身協調によるモーション・フォース制御
ロボットの動作生成においては、人間が真似できない難しい単一作業を実現することよりも、人間にはたわいない動作を実環境下において複数を有機的に融合し、運動と力を考慮した役立つ作業として実現することが極めて難しい。本研究はその課題解決に対して貢献するものである。
研究成果の概要
1. アフォーダンスに基づいた家庭環境内の物品認識・操作および家庭内作業の計画・動作生成
本課題は、心理学者のGibsonが提唱し、Normanによって工業デザインへ適用されたアフォーダンスという概念に基づいて家庭内の環境や物品を操作するために必要なデータセットを構築することと、そのデータセットを有効利用することが可能な物体認識・把持計画・力までを考慮した作業能力を持つロボット制御システムを開発することが目的である。アフォーダンスとは、環境によってエージェント(人間や動物)に提供(afford)される行動の可能性であり、例えば、椅子には座るというアフォーダンスがあると考える。これを家具・家電・内装のような家庭環境内に存在する物品全般の扱いを考慮するためのデータセットの構築に活かし、扱い方や自由度を有する物品の操作をホームロボットにより実現する。昨年度はROSをシステム基盤にして、データセットの基本構成と図2のような家庭内の物体認識と把持計画のためのソフトウェアシステムが構築できた。
2. DNNを利用した学習による家庭内作業動作生成能力の獲得とこれによる作業動作の実現
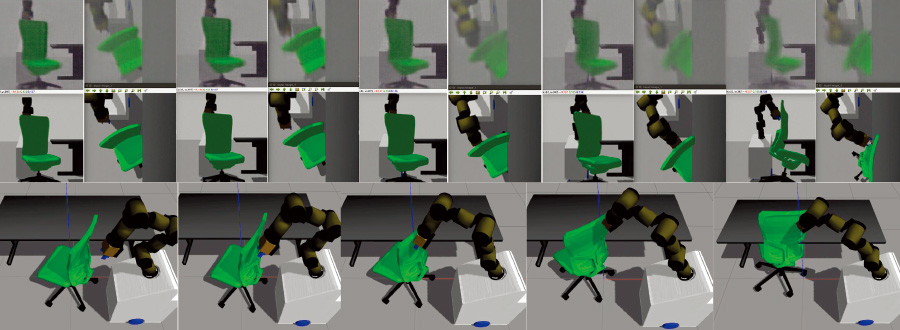
本課題は、ここ数年GoogleやPFNにけん引されて、著しい研究成果が発表されている深層学習や強化学習を利用した機械学習によるロボットの動作獲得技術を、ホームロボットによる家庭内作業、特にロボティクス分野からの取り組みが不可欠な力作業の実現に発展させることが目的である。昨年度は図3のように、オペレータが動力学シミュレータ上のホームロボットを操作して、椅子を机に押し入れて片付ける作業動作を実演し、その際の多視点から観測した作業画像とホームロボットの関節角度情報を教師データに、VAE-GANとLSTMを組み合わせたDNNにより学習させたネットワークを用いて動作を生成することで、モジュラーホームロボットの作業動作を獲得できた。

今後の展望
ホームロボットを実環境下で利用するためには、物を運ぶ・片付ける、ボタンを押す、扉や窓を開閉するなど、人間にとっては当たり前に実現できる付加価値が低い作業だが、頻繁に利用される日常的な動作を短時間に獲得し、実現できるようにしなければならない。今後は、昨年度の研究成果を、科研費の研究課題であるヒューマノイドロボットのモーション・フォース制御の研究成果と融合し、実際のホームロボットによる家庭内作業の達成へつなげ、より大きな成果としたい。
本研究に関する成果発表
- 山内翔太,松島駿介,徳永夏帆,佐藤大祐,金宮好和,家庭用品操作時の多視点画像に基づくVAE-GAN+LSTMによるホームロボットの動作生成,ロボティクス・メカトロニクス講演会2018,2018年6月,1A1-F14.
- 仙石凌也,栗島直弘,徳永夏帆,佐藤大祐,金宮好和,家庭用品の把持領域や自由度の情報を含む3Dモデルデータを用いたホームロボットの物体認識手法,ロボティクス・メカトロニクス講演会2018,2018年6月,2P1-C18.
- 宮原笙,金宮好和,佐藤大祐,シナジーを用いた動力学におけるバランス維持戦略,MSCS 2018 – 計測自動制御学会 制御部門,2018年3月,PS-19.
- 仙石凌也,徳永夏帆,佐藤大祐,金宮好和,家庭用品の把持計画のためのSurface Matchingによる物体認識,MSCS 2018 – 計測自動制御学会 制御部門,2018年3月,PS-21.
- 日向遼太郎,金宮好和,佐藤大祐,人型ロボットの速度次元でのバランス制御,MSCS 2018 – 計測自動制御学会 制御部門,2018年3月,PS-45.
- 山内翔太,徳永夏帆,佐藤大祐,金宮好和,ホームロボットのための家庭用品の操作実演に基づくVAE-GAN+LSTMを用いた動作生成,MSCS 2018 – 計測自動制御学会 制御部門,2018年3月,PS-47.
- 白井智史,佐藤大祐,金宮好和,人型ロボットのための二次計画問題における計算コストの評価,第18回計測自動制御学会システムインテグレーション部門講演会,2017年12月,pp. 2577–2582.
- 千葉貴文,永田和之,多田充徳,朝岡忠, 西卓郎,佐藤大祐,金宮好和,配列された物品把持における手指の運動解析,第18回計測自動制御学会システムインテグレーション部門講演会,2017年12月,pp. 2282–2286.
- 細川雅弘,白井智史,金宮好和,佐藤大祐,DCM擬似逆行列によるレンチの分配法 -未知の外乱に対するLift-Leg Strategyの実現-,第35回日本ロボット学会学術講演会,2017年9月, RSJ2017AC2L1-05.
- 千葉貴文,永田和之,多田充徳,佐藤大祐,金宮好和,特定の物品配列パターンに基づく把持戦略の分類,第35回日本ロボット学会学術講演会,2017年9月,RSJ2017AC3K2-05.
- 千葉貴文,永田和之,佐藤大祐,金宮好和,配列された物品のピッキングにおける把持計測,ロボティクス・メカトロニクス講演会2017,2017年5月,1P2-B11.