理工学部研究年報
UAV ボクセルによる3 次元配置ディスプレイのための被覆制御手法の開発
機械システム工学科 関口和真
研究背景・目的
ボクセルという3 次元要素を基本単位とする3 次元の映像情報の提示手法が近年盛んに開発されている。3次元情報の提示として顕著なものに仮想現実や拡張現実の技術がある。またLEDのついた棒を高速で回転させながら回転に合わせてLED の発光を制御する,残像を利用した3次元描画を実現するデバイスが開発されており,数十人規模への3次元情報の提示が可能である。さらに大規模な3次元情報の提示システムとしてドローンを用いた3 次元映像の描画が開発され,インテルによって数百台のドローンを用いたデモンストレーションがおこなわれている。インテルによって開発されたシステムでは,描画したい画像に応じて各ドローンが飛行する経路を最適化計算によって事前に算出しておき,その軌道に沿って自己位置センサを搭載したドローンを飛行させることで実現している。最適化計算において衝突の回避を考慮した経路を自動で生成するシステムを構築することで500台ものドローンによる空間描画を実現している。この手法は描画したい情報が事前に明確な場合には有効な手法であるといえるが,オリンピックでの試合の中継など,描画すべき内容が事前にはわからない,3次元の動画のようなリアルタイム性が求められる描画には適用することはできない。本研究ではドローンを用いた次世代3次元配置ディスプレイの実現のために求められる,膨大な数のドローンの利用に耐える柔軟性を持ち,リアルタイムに変化する動画の描画を可能とするシステムの構築に向け,(1)個々のドローンの運動性能を向上させる制御則の構築と(2)大規模に変化する描画を可能とする群れとしての制御システムの構築を目指す。
研究成果の概要
(1)個々のドローンの運動性能を向上させる制御則の構築
風外乱のうち定常性を持つ部分に対しては機体が風から受ける影響を空間上に分布したマップとして学習し,モデルのダイナミクス情報による予測をもちいた制御の中でこのマップ情報を利用することで事前に受ける風の影響を予測し影響をキャンセルするような入力を生成することで風の影響を軽減できることを明らかにした(業績5)。さらにマップ化しきれない擾乱成分にも対応するため,モデルの出力と実験機の出力の差をフィードバックし入力を補償するモデル誤差補償器を用いることで経路追従性能を向上させられることを示した(業績4)。個々のUAVの運動性
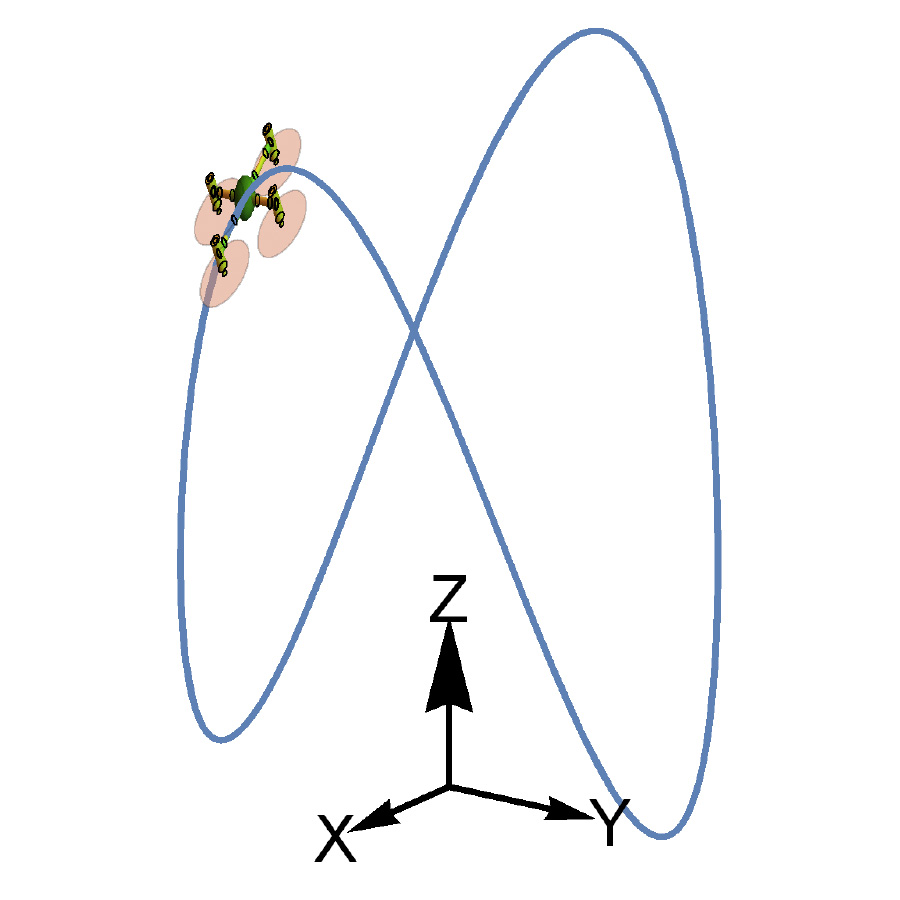
能を向上させる取り組みとして,階層型線形化という近似を用いない新しい線形化手法を開発・発展させUAVを含む様々なシステムが線形化可能であることを明らかにした(業績1)。この線形化手法と線形制御器を組み合わせることで,UAV の非線形性を陽に考慮した非線形制御器が実現し,図1 に示すようなこれまでの制御器では実現が難しかったダイナミックな動きを可能とした。この制御器を実装するためにはモデルパラメータの同定や直接観測できない状態の推定が必要になるが,これらについてはカルマンフィルタを非線形システムにも適用できるよう拡張した無香料
カルマンフィルタという手法を用い,基礎的な検証をおこなった(業績6, 9)。
(2)大規模に変化する描画を可能とする群れとしての制御システムの構築
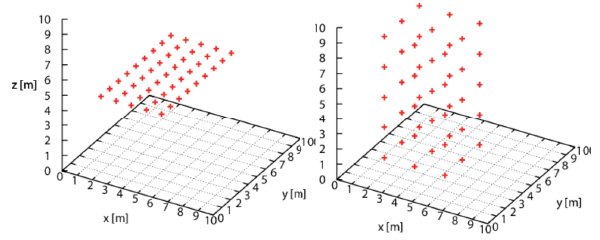
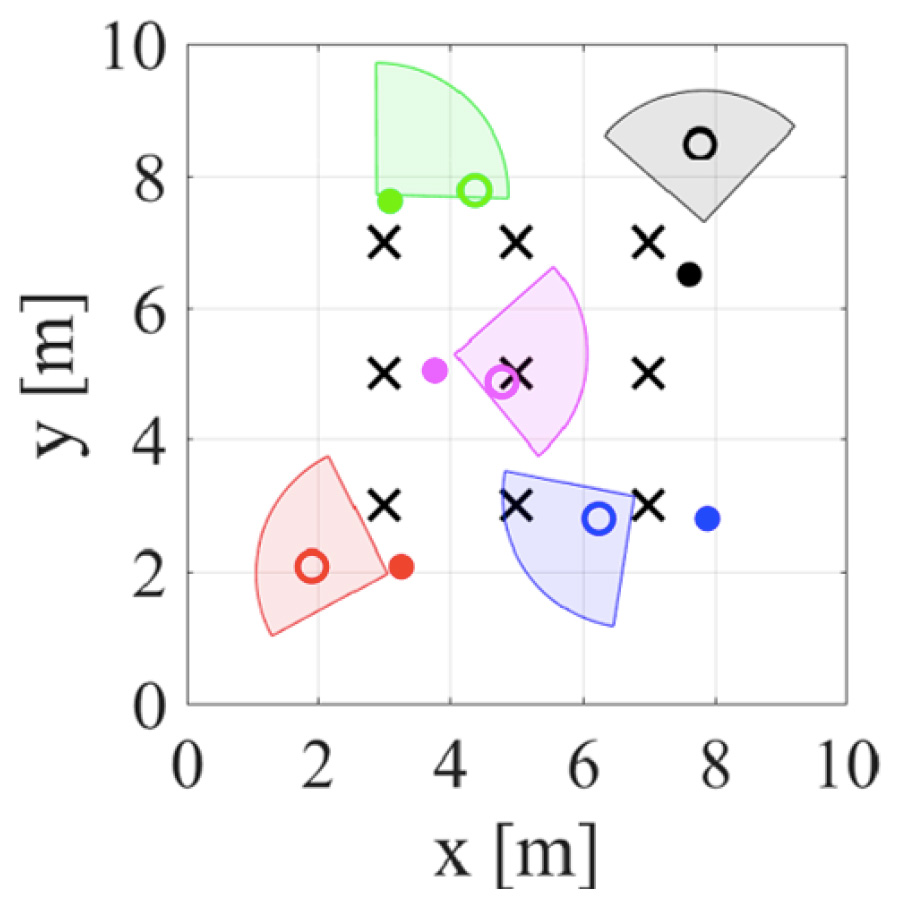
フォーメーション制御手法を3次元空間上のフォーメーション形成に適用し数値シミュレーションによって実現可能性を示すと共に,図2に示すようなUAVの大きさを考慮しないと衝突してしまうようなシチュエーションにおいても,人工ポテンシャル場による衝突回避手法を組み込んだモデル予測制御によって3次元フォーメーションが達成可能であることを数値シミュレーション・実機実験を通して示した(業績2)。また階層型線形化を用いた非線形制御器とフォーメーション制御の組み合わせについても検討をおこない数値シミュレーションでフォーメーションの達成を確認した(業績7, 10)。またフォーメーション制御だけでなく被覆制御というフォーメーションとは異なる分散制御手法に研究を進めた。被覆制御とはUAVの空間内における位置・姿勢に応じて値を定める重要度という考え方を元に,この値を最大化するように各UAVが自律的に行動を決定する分散制御手法である。この手法に被覆効率を上げるための機能やセンサ測距範囲を陽に考慮した被覆制御則へ改良(図3) することで,フォーメーション制御に比べより柔軟に3次元画像を描画することを可能にした(業績3, 8)。
今後の展望
分散制御手法はエージェントの数が増減しても全てのエージェントに同じコントローラを適用可能であるというスケーラビリティとエージェントの役割が並列的であることにより,エージェントの追加や故障などに対してロバストであるという特徴からドローン群の制御システムに適しているといえる。本研究で得られた階層型線形化と分散制御手法を組み合わせる手法によって,ドローンの持つ高い運動性能を活かしたドローン群システム実現の可能性が出てきたが,非線形コントローラを実装するためにはドローンの非線形な動特性の同定と非線形モデルにおける状態の推定が必要となる。この同定・推定手法の基礎として業績3, 8の研究をおこなったが,実機を用いての検証には至っていない.そのためこれら研究を発展させ非線形コントローラの直接的な実装を実現することが今後求められる。
本研究に関連する主な成果発表
1. Kazuma Sekiguchi , “Novel Control Method for Quadcopter -Hierarchical Linearization Approach-“, The 2017 Asian Control Conference, pp. 1853-1858, 2017.
2. Kenta Yamamoto, Kazuma Sekiguchi , Kenichiro Nonaka , “Experimental Verication of Formation Control by Model Predictive Control Considering Collision Avoidance in Three Dimensional Space with Quadcopters”, The 2017 Asian Control Conference, pp. 1602-1607,2017.
3. Masataka Naruse , Kenta Yamamoto, Kazuma Sekiguchi , Kenichiro Nonaka , “Verication of Coverage Control for Multi-Copter with Local Optimal Solution Avoidance and Collision Avoidance Using Random-walk and Articial Potential Method”, SICE Annual Conference 2017, pp. 440-445, 2017.
4. Hiroaki Endo, Ryo Aramaki, Kazuma Sekiguchi , Kenichiro Nonaka , “Application of Model Error Compensator based on FRIT to Quadcopter”, 1st IEEE Conference on Control Technology and Applications, pp. 2088-2093, 2017.
5. Takahiro Suyama, Kazuma Sekiguchi , Kenichiro Nonaka , “Interference Suppression Control for Interaction of Two Quad Copters by Model Predictive Control Using the Disturbance Map”, 1nd IEEE Conference on Control Technology and Applications, pp. 331-336, 2017.
6. 山口諒真, 関口和真, 野中謙一郎, “オープンソフトウェアを利用したUAV の自律制御”, 第5回計測自動制御学会制御部門マルチシンポジウム, pp. PS-51, 2018.
7. 山本健太, 関口和真, 野中謙一郎, “階層型線形化を用いた自動運転車両の合意制御”, 第5回計測自動制御学会制御部門マルチシンポジウム, pp. Fr62-1, 2018.
8. 竹内和, 成勢昌隆, 関口和真, 野中謙一郎, “測域範囲に制限のあるセンサを用いた未観測領域を考慮した被覆制御”, 第5 回計測自動制御学会制御部門マルチシンポジウム, pp. Sa91-5, 2018.
9. 相馬淳志, 関口和真, 野中謙一郎, “オイラーパラメータベースのUKF を用いたクアッドコプターの位置・姿勢推定”, 第5 回計測自動制御学会制御部門マルチシンポジウム, pp. Sa91-3, 2018.
10. 山本健太, 関口和真, 野中謙一郎, “階層型線形化を用いたクアッドコプタの合意制御”, 第60回自動制御連合講演会, pp. SuC1-6, 2017.