ロケット・宇宙工学
理論と観測を通して宇宙の成り立ちや現象を研究する。誕生から45億年と言われている地球についてあらゆる角度から研究したり、宇宙そのものを対象として実験や観測を通してその謎を解明したりする。また、宇宙ステーションやロケットの研究など工学的な研究をする。

理論と観測を通して宇宙の成り立ちや現象を研究する。誕生から45億年と言われている地球についてあらゆる角度から研究したり、宇宙そのものを対象として実験や観測を通してその謎を解明したりする。また、宇宙ステーションやロケットの研究など工学的な研究をする。
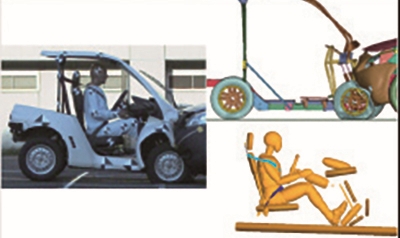
模型実験とシミュレーションから自動車衝突を解明する自動車衝突時における車体構造と乗員の安全について、縮尺模型実験とシミュレーションの両面から検討を行っています。乗用車だけでなく今後実用が広まるミニカーや、交通弱者である歩行者と自転車乗員など幅広く検討しています。車体構造については荷重伝達の観点から評価して、効率の良い構造の模索を行っています。また、東京大学生産研究所との共同研究としてドライビングシミュレータを用いて運転支援システムの構築と運転のしやすさの両立を検討しています。
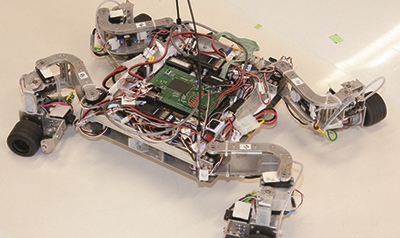
車やドローンの自動運転の最先端制御技術の研究自動車の衝突防止や車線追従、航空機のオートパイロットなど、今日のテクノロジーは制御工学によって大きく発展しました。本研究室では移動ロボットや無人航空機を対象として、未来の動きの予測に基づく制御や複数の機体の協調制御など新しい手法を開発しています。また、制御性能を高めるため、実際に移動ロボットを設計・開発し、理論の検証と改善に役立てています。このように本研究室では、ソフトとハードの両面から制御技術の限界にチャレンジしています。
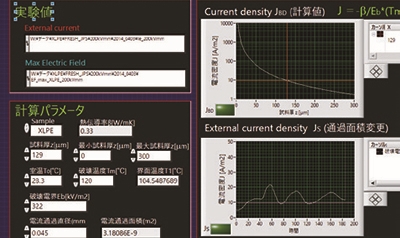
世界に通用する最先端の計測・制御技術開発宇宙機や電力ケーブルに使用される絶縁材料を評価するための計測技術や、磁気浮上して回転するモータを制御する技術の開発を行っています。一見まとまりのないテーマのように見えますが、共通しているのは、実際に計測装置やモータなどを設計・作製し、世界に1つしかないものを作り出していることです。学科で学ぶ電気、機械、制御といった基礎的な学問を活かして、実際に最先端の計測制御機器を作製し、常に最先端の研究成果を発表しています。
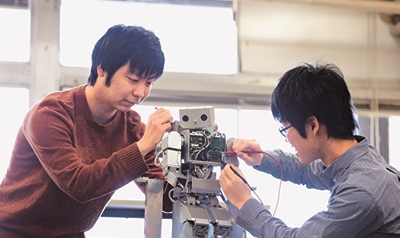
ロボットの運動制御技術によって人や社会を支援する人型ロボットの全身協調による力作業の実現、人間の姿勢維持に基づくバランス制御、モジュラーホームロボットの開発、日用品を扱うロボットの自律動作生成を主な研究課題とし、これらの基本となる動力学と拘束を考慮した多体系の運動制御法や実時間動作生成手法、独自のロボットシステムの開発にも力を入れながら、実世界に働きかける機能を持つ知能化システムであるロボットの運動制御技術を研究しています。
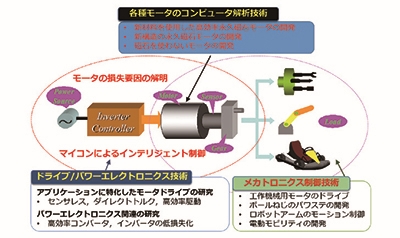
電気自動車から家電まで幅広いモータドライブの最先端研究100年以上の歴史を持つ電気機器ですが、省エネルギーが叫ばれる昨今の代表格にモータが注目されています。当研究室は、電気自動車から家庭用電化製品に至るまで、多種多様なモータの設計開発、それを動かすためのパワーエレクトロニクス分野の回路やドライブ技術の研究をしています。また、大規模な搬送システムに利用するリニアモータの研究も行っています。モータ応用としてロボットハンドやパーソナルモビリティなどのメカトロニクスの研究も行っております。

リニアモーターカーを支える様々な技術の高度化リニアモーターカーに使われている中核技術、特にリニアモータ・リニアアクチュエータ、各種磁気浮上・磁気支持システム、超電導応用機器などの研究を行っています。さらに、モータの概念を大きく変える意欲的な提案として、環境・資源問題に配慮したオールアルミモータの研究も行っています。次世代につながる、新しい電磁駆動システムを提案することが、研究グループとしての大きな目標です。学生の自由な発想を、教員の指導を受けながら現実味のあるモノに発展させていくことが、この分野の研究の醍醐味でもあります。

誰もやらない研究・人に役立つ研究を目指せ!!機械と電気(電子)と医学を有機的に結びつけた医用工学分野(医学の問題を工学的な手法で解決する境界・複合領域)において、機械的な手段を取り入れた技術を構築して臨床、福祉医療などの諸問題を解決することを目指した研究を進めています。主に、実機の設計・試作、および実験的検証を主眼としています。
車やドローンの自動運転の最先端制御技術の研究自動車の衝突防止や車線追従、航空機のオートパイロットなど、今日のテクノロジーは制御工学によって大きく発展しました。本研究室では移動ロボットや無人航空機を対象として、未来の動きの予測に基づく制御や複数の機体の協調制御など新しい手法を開発しています。また、制御性能を高めるため、実際に移動ロボットを設計・開発し、理論の検証と改善に役立てています。このように本研究室では、ソフトとハードの両面から制御技術の限界にチャレンジしています。
ロボットの運動制御技術によって人や社会を支援する人型ロボットの全身協調による力作業の実現、人間の姿勢維持に基づくバランス制御、モジュラーホームロボットの開発、日用品を扱うロボットの自律動作生成を主な研究課題とし、これらの基本となる動力学と拘束を考慮した多体系の運動制御法や実時間動作生成手法、独自のロボットシステムの開発にも力を入れながら、実世界に働きかける機能を持つ知能化システムであるロボットの運動制御技術を研究しています。
誰もやらない研究・人に役立つ研究を目指せ!!機械と電気(電子)と医学を有機的に結びつけた医用工学分野(医学の問題を工学的な手法で解決する境界・複合領域)において、機械的な手段を取り入れた技術を構築して臨床、福祉医療などの諸問題を解決することを目指した研究を進めています。主に、実機の設計・試作、および実験的検証を主眼としています。
世界に通用する最先端の計測・制御技術開発宇宙機や電力ケーブルに使用される絶縁材料を評価するための計測技術や、磁気浮上して回転するモータを制御する技術の開発を行っています。一見まとまりのないテーマのように見えますが、共通しているのは、実際に計測装置やモータなどを設計・作製し、世界に1つしかないものを作り出していることです。学科で学ぶ電気、機械、制御といった基礎的な学問を活かして、実際に最先端の計測制御機器を作製し、常に最先端の研究成果を発表しています。
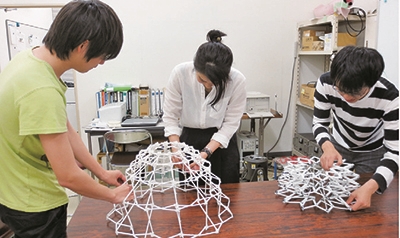
先端的な宇宙機構造や推進・帯電についての研究人工衛星やロケットなどの宇宙機システムを研究対象とし、構造、機能モデルの試作による実証実験や検証実験、解析シミュレーション等を行うことによって、研究開発力を養います。また、軌道周回衛星や深宇宙探査衛星等への適用を目指した新たな宇宙構造物概念を創出する他に、宇宙環境が宇宙機に及ぼす影響の定量的把握や、学生によるロケット打ち上げ実験を可能にする新たなロケットエンジンシステムの開発などを通して実践的な設計開発能力を養成します。
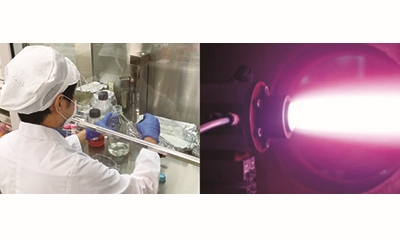
宇宙工学と医工学をつなげる材料工学本研究室ではバイオマテリアルの開発・宇宙開発技術の応用という2つの異なった分野の研究を行っています。生体材料は機械加工の技術を用いてインプラント材料表面を改質し、その生体適合性への効果を検証の他、新規バイオセラミックスの開発も開始しています。宇宙開発分野では宇宙空間で使用するプラズマロケットの技術を応用して、再使用宇宙往還機の耐熱タイルの開発および大気圏再突入環境模擬の実験設備の開発を行っています。

宇宙望遠鏡を用いた赤外線観測天文学本研究室では、主に近赤外線波長域における観測天文学の研究を進めています。特に宇宙望遠鏡を用いた天文観測を主に進めており、宇宙望遠鏡の開発にも関わっています。関連する主な宇宙ミッションは、NASAの観測ロケットプログラムCIBER-2、JAXAの小惑星探査機「はやぶさ2」、木星圏の小型赤外線望遠鏡計画EXZIT、ガンマ線バースト観測衛星計画HiZ-GUNDAMなどです。
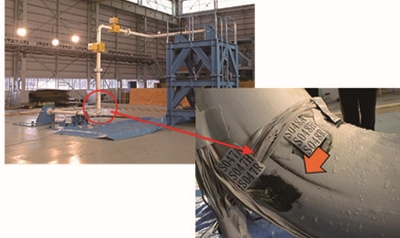
原子力発電施設の機器・配管系を対象に、地震時の損傷挙動の把握や合理的な耐震性評価の実現を目指す原子力発電施設の機器・配管系を主な対象とし、実験による実現象の把握を中心に、地震荷重下の終局挙動の調査、高経年配管系の耐震性評価に関する研究、詳細弾塑性解析による評価を実施しています。また、それらの結果に基づき、現在の耐震設計の高度化を目指した研究も行っています。
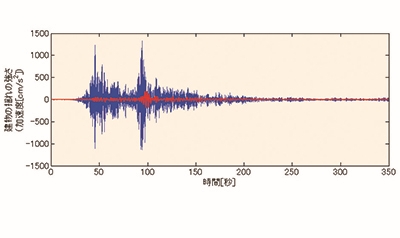
地震による被害をなくすために!2011年東北地方太平洋沖地震のような大きな揺れであっても原子力発電所に被害を起こさせないために、地震による構造物(機器・配管、建屋、土木構造物等)の揺れの計算や、構造物が壊れるメカニズムの研究を行っています。また、大きな揺れでも被害を生じさせない構造物にするために、既にある構造物を補強する方法の検討や、その効果を効率的に計算する方法を研究しています。